Highlight
Winged Rescue Robot Gives Clues to the Origin of Flight
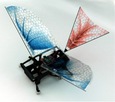
Evolving flight in a legged robot.
Achievement/Results
Graduate student Kevin Peterson, Co-Principal Investigators Ron Fearing and Robert Dudley and their team of engineers and biologists from the University of California at Berkeley designed a novel legged robot with wings that is not only leading the way to the next generation of search-and-rescue robots, but has also unexpectedly shed light on one of the greatest mysteries in biology – the evolution of flight. Support by a National Science Foundation-sponsored Integrative Graduate Education and Research Traineeship (IGERT) in Bio- and Bio-inspired Motion Systems Operating in Complex Environments provided the unique interdisciplinary connections to make it possible. Adding wings to a micro-sized, hexapedal robot allowed faster running and a greater ability to negotiate inclines, all necessary if robots are to assist humans in disasters such as earthquakes, tornados, and explosions. Testing the DASH (Dynamic Autonomous Sprawled Hexapod) plus Wings revealed that although speed was increased, it was insufficient to permit a running take-off. Flight expert, Robert Dudley, realized the winged robotic runner served as a physical model that rejected the ground-up origins of flight in favor of top-down gliding.
The IGERT team’s discovery was published in the interdisciplinary journal, Bioinspiration and Biomimetics, listed as a “Best Robot of 2011” by CBS Smart Planet, was featured in the journal Science, serves as a display in the London Science Museum and was presented at the Intelligent Robotics and Systems (IROS) 2011 engineering conference and at the Society of Integrative and Comparative Biology Meeting.
The hybrid legged/winged robot, DASH+Wings, provided important lessons about the design of multifunctional robots. The goal of DASH+Wings was to develop a flying and crawling robot capable of greater mobility than current robots of its size, allowing it to explore a larger area without becoming trapped. The robot has many potential applications, with a primary one being search-and-rescue in dangerous environments where it may not be safe for humans to enter. While DASH+Wings was not capable of flight, the wings improved mobility. DASH+Wings was able to run nearly twice as fast and climb inclines three times steeper than the robot with legs alone. It also proved remarkably stable, resisting failure due to inversion that often befell the legs alone version of the robot. Finally, the robot was capable of gliding when in the air, a much more controlled aerial behavior than falling. All of these abilities showed the promise of a hybrid robot, and helped guide the design of a new robot, BOLT, that is capable of true aerial flight.
DASH+Wings is a truly bio-inspired design, using six legs in an alternating tripod gait to efficiently move with the aid of passive, dynamic stability. The flapping wings enable the robot to climb steeper inclines, a behavior similar to that found in some species of birds. When designing DASH+Wings, the robot would often flip over when running without the wings, an important control experiment. From the background provided through discussions with biologists and courses taken in biology offered through the IGERT Program, the problem was determined to be the result of incorrectly tuned leg stiffness. In nature, most animals have very similar leg stiffness when adjusted for leg number, mass and length. Using this knowledge, the stiffness of the legs was adjusted to the proper range and the robot’s performance improved greatly.
The robot’s use in exploring theories on avian flight evolution was a completely unexpected function of the robot, but is yet another demonstration of the creative serendipity that arises from interdisciplinary interactions. While trainee Kevin Peterson was disappointed as an engineer that DASH+Wings was not capable of flight, biology professor Robert Dudley saw an opportunity to study the evolution of flight. This opportunity would not have been possible without the close relationship between engineering and biology at Berkeley facilitated by the IGERT Program through the center which provides its interdisciplinary home, the Center for interdisciplinary Biological-inspiration in Education and Research (CiBER). Professor Dudley believed that a robot that was not quite capable of flight could be considered very similar to an early bird ancestor that was not quite capable of flight. By systematically measuring the performance of the robot both with and without the wings, we were able to determine exactly what effect the wings had on the locomotion capabilities, and compare this to the predicted capabilities of early birds. This research, taken together with the other evidence, supported the theory that birds evolved from animals that lived in trees and progressed from gliding to flight.
Address Goals
Discovery. Micro-sized Rescue Robot Earns its Wings. Current challenges in science, engineering, industry and society demand research-based skills as well as the ability to collaborate in diverse, interdisciplinary teams. The goal of UC Berkeley’s Center for interdisciplinary Biological-inspiration in Education and Research (CiBER) IGERT is to train biology and engineering PhD students how to develop mutualistic teams that energize transformative, interdisciplinary, basic research and translate fundamental discoveries into societal benefits.
The development of the novel hybrid robot, DASH (Dynamic Autonomous Sprawled Hexapod) + Wings demonstrates the value of the synergies developed when interdisciplinary collaborations are facilitated. A major challenge in the development of search-and-rescue robots is their mobility. Entering a disaster area such as one destroyed by a tornado, earthquake or explosion requires the ability to move through rubble. Likewise, effective rapid detection of chemical, biological and nuclear hazards demands mobile sensors that can maneuver in environments such as subways, airports, train stations and other public places. Present-day terrestrial robots have limited mobility. Here, we show that the addition of wings could increase the robot’s speed, prevent it from becoming trapped, enhance its ability to climb slopes and provide the unique capability of gliding from one surface to another when confronted with large gaps. Design of DASH+Wings benefited from looking towards Nature. Six-legged insects are remarkably stable when confronted with rough terrain. The new robot not only used the six legged design, but also took advantage of the gait adopted by insects where three legs on the ground simultaneously provides a remarkably stable base of support. Both insects and birds use wings not only for flapping flight, but also for gliding and to assist terrestrial locomotion. Here we show another example of how inspiration from biological discoveries can produce transformative advancements in engineering that more rapidly translate into societal benefits.
Learning. Winged Robot Gives Clues to the Origin of Flight. Our research provided several basic lessons instrumental to future robotic design, paving the way toward multifunctional robots capable of traversing environments with as much success as animals. Yet, what appeared to capture the imagination of the nation was the unexpected connection that the robot provided back to biology. The robot’s biologically inspired design allowed it to be used as a physical model to test the hypotheses of the origins of animal flight. The synergy of biology inspiring engineering and then engineering returning the favor to biology by generating new testable hypotheses of long-standing biological questions highlights the true advantage of IGERT programs. Never before did biologists have a physical model that had both legs and wings. DASH+Wings made it possible to test the ground up versus top-down models offered to explain the origin of flight in animals. Fossil evidence makes it difficult to distinguish between an origin where flight evolved from aerial decent in trees or one where it appeared as a result of flapping wings during very rapid running on the ground. The robot confirmed the challenge faced by the ground-up hypothesis, since it could not attain the fast speeds required for take-off. However, robot testing showed that flapping wings provided a significant benefit for gliding from top-down. Although this is clearly only a first step in answering the long-standing question concerning the origins of flight, it offers a new tool never before available.
Certainly, the extensive coverage by the popular media reveals the public’s inherent interest in general biological questions. Understanding evolution, and our origins, can provide a unique entryway to informing the public not only about fundamental discoveries in biology, but also relevant engineering advancements that result when research is done in an interdisciplinary context. The present study reveals how answering fundamental, curiosity-based research questions can teach the public how science and engineering really work. From studies like this, informed citizens are more likely to see the connection between transformative basic research and its translation into relevant devices that have direct societal benefit to humans and other organisms in the environment.